| Namespace | http://diggsml.org/schemas/3 | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Annotations
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Diagram
|
 |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
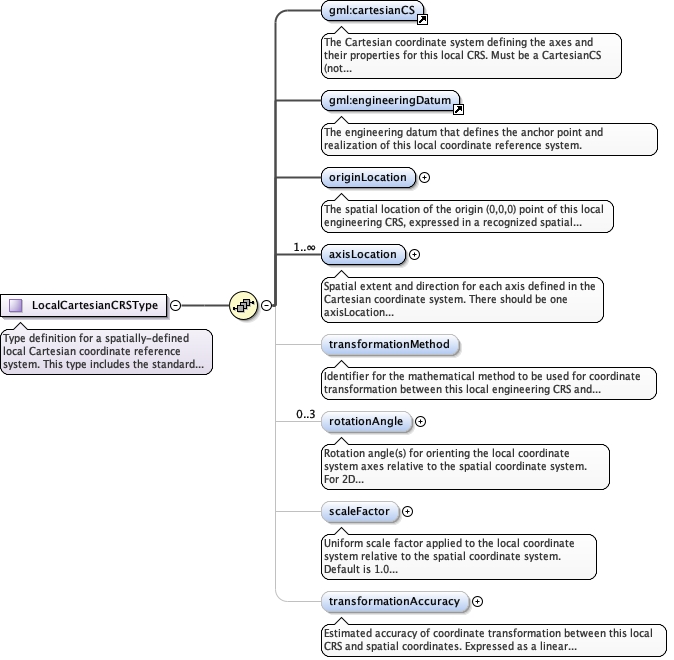
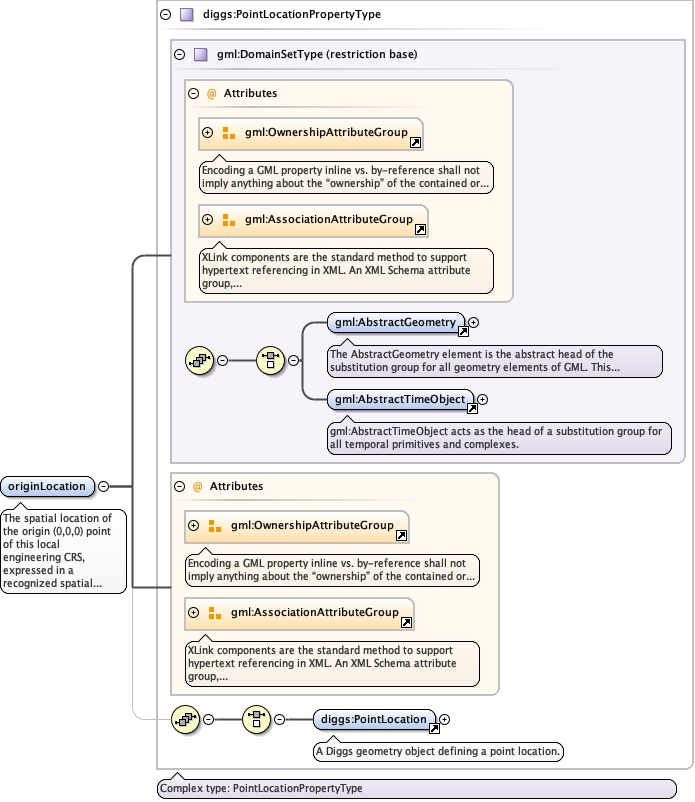
| Type | diggs:PointLocationPropertyType | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Type hierarchy | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Properties
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Model | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
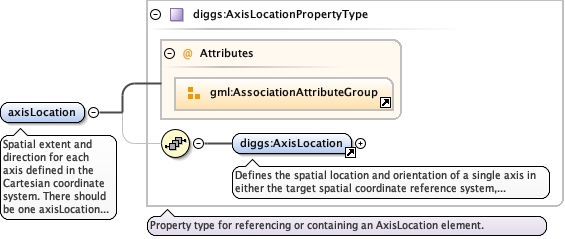
| Children | diggs:PointLocation | ||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Instance
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
Attributes
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Schema location | file:/Users/dponti/GitHub/diggs-schema/core/LocalReferencing.xsd |