| Namespace | http://diggsml.org/schemas/3 | ||
|
Annotations
|
|
||
|
Diagram
|
 |
||
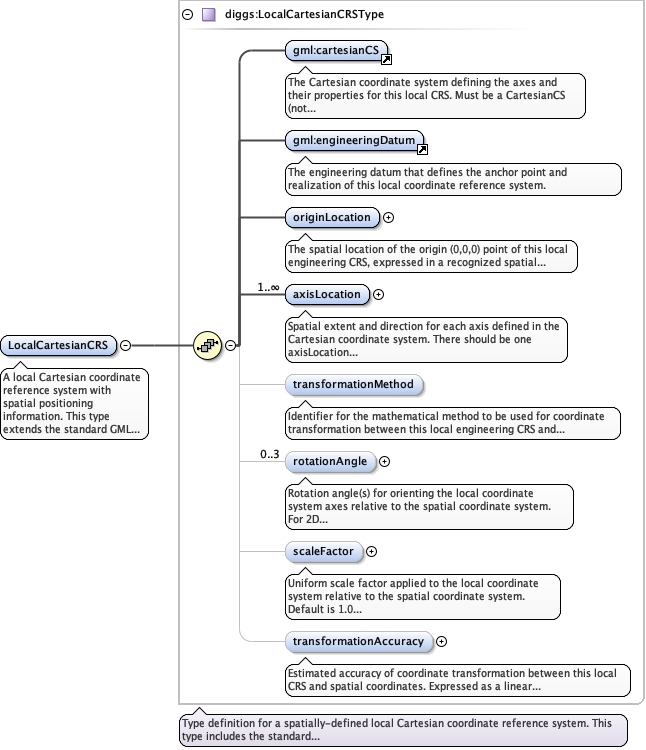
| Type | diggs:LocalCartesianCRSType | ||
| Type hierarchy |
|
||
|
Properties
|
|
||
| Substitution Group Affiliation |
|
||
|
Used by
|
|||
| Model |
cartesianCS , engineeringDatum , diggs:originLocation , diggs:axisLocation+ , diggs:transformationMethod{0,1} , diggs:rotationAngle{0,3} , diggs:scaleFactor{0,1} , diggs:transformationAccuracy{0,1}
|
||
| Children | cartesianCS, diggs:axisLocation, diggs:originLocation, diggs:rotationAngle, diggs:scaleFactor, diggs:transformationAccuracy, diggs:transformationMethod, engineeringDatum | ||
|
Instance
|
|
||
|
Source
|
|